Path Invariance under Cyber-Attacks
A transverse-feedback-linearization controller that keeps a quadrotor on its path with provable forward invariance, even when an adversary hijacks a rotor.
What happens to a quadrotor’s mission when an attacker takes over one of its rotors? This project designs a path-following controller that guarantees safe maneuvers — in the sense of forward path invariance — in the presence of cyber-physical attacks.
We model an adversary that can drive any single rotor through a false-data-injection (FDI) attack. Using transverse feedback linearization, we build a controller with a closed-form analytical expression that is cheap to compute, mitigates the bounded malicious signal, and provably keeps the quadrotor on a class of smooth curves — ensuring mission success despite the attack.
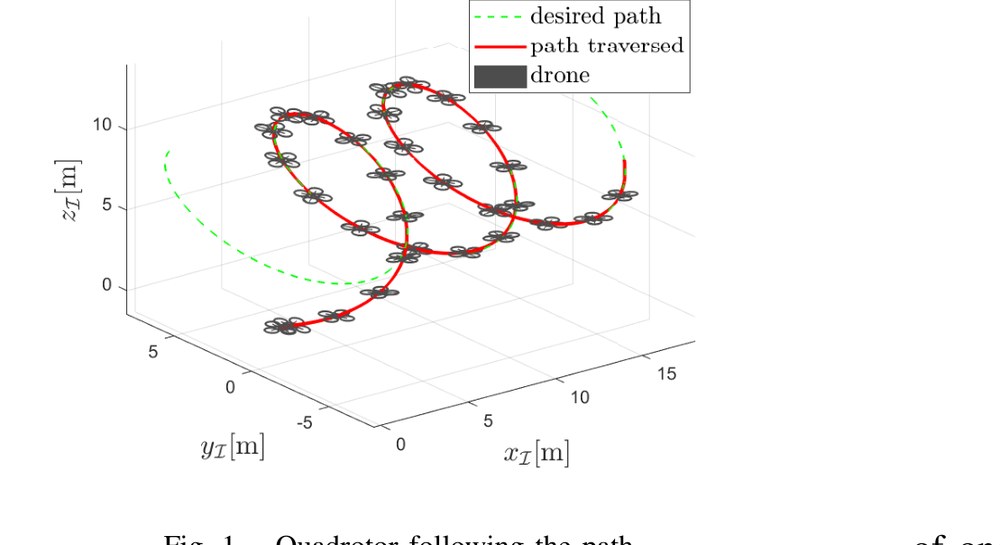
The quadrotor (drone snapshots) tracks the desired path (green) via the traversed trajectory (red) even while one rotor is under attack.
Contributions
- Provable forward path invariance under bounded FDI attacks, with realistic assumptions.
- A computationally efficient, closed-form controller — no online optimization required.
- The controller also enforces a desired speed profile along the path during the attack.
Path Invariance of a Quadrotor System under Cyber Attacks with Theoretical Guarantees — Hamza Mahmood, Usman Ali, Adeel Akhtar (American Control Conference 2025).