Safe Hybrid Control with Barrier Functions
A hybrid framework for car-like robots that combines global convergence with guaranteed path invariance and obstacle avoidance, using control barrier functions.
For a car-like robot moving through an environment with obstacles, we interpret safety as path invariance: once the robot converges to a feasible, obstacle-free path, it must never leave it. Trajectory-tracking controllers cannot guarantee this — a fundamental performance limitation means the robot may drift off the path and into obstacles.
We solve the problem in two stages. First, within a “tight” obstacle-free neighborhood of the path, a local controller ensures both convergence and path invariance, with a control barrier function (CBF) steering the system away from the singular configurations where the local law is undefined. Second, a hybrid control framework stitches this local path-invariant controller together with any off-the-shelf global tracking controller — inheriting global convergence from the latter and path-invariance + robustness from the former.
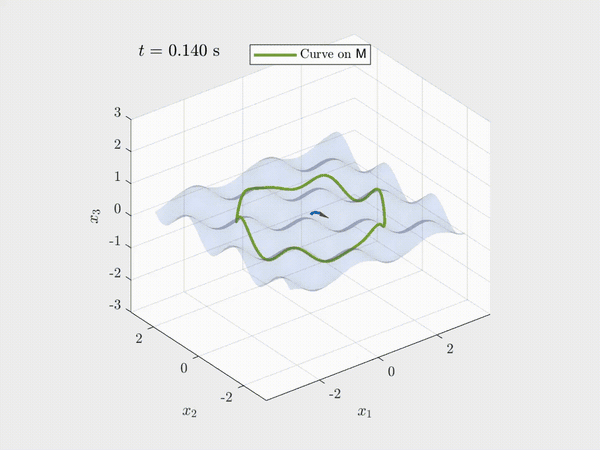
Once the state reaches the path-following manifold it remains invariant — the geometric essence of "safety as path invariance."
Guarantees
- Global convergence from any initial position to the desired path.
- Forward path invariance — the robot provably never leaves the path after reaching it.
- Robustness to sensor noise, with the CBF avoiding singular configurations along the way.
A Safe Hybrid Control Framework for Car-like Robot with Guaranteed Global Path-Invariance using a Control Barrier Function — Nan Wang, Adeel Akhtar, Ricardo G. Sanfelice.