Schrödinger Bridges on SO(2)
A coordinate-free solution to the Schrödinger bridge problem on the circle — steering probability densities on SO(2) with minimum control effort.
The Schrödinger bridge problem (SBP) asks for the controller that drives the entire probability density of a stochastic system from a prescribed initial distribution to a prescribed terminal distribution over a fixed time horizon, while spending the least control effort. It is density control: we steer the whole population of states, not a single trajectory — with applications from robotic swarms to traffic densities.
Most existing SBP theory lives in Euclidean space. But most robots — drones, wheeled vehicles — have a Lie group as their state space. Here we solve the isotropic SBP for the kinematic equation on SO(2), taking angular velocity as the control input.
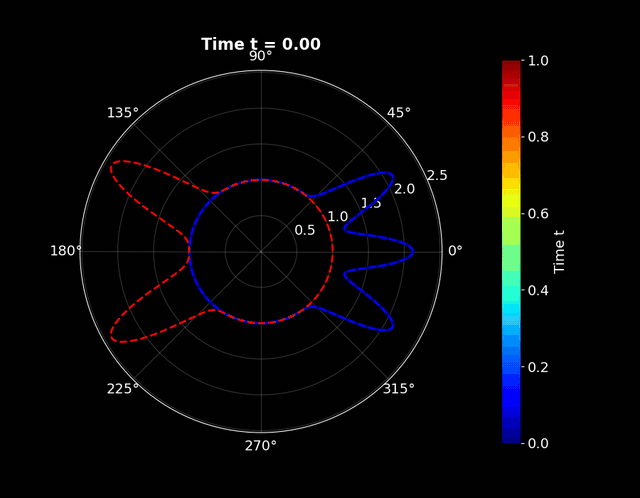
The optimal density evolving on SO(2): the initial distribution is transported to the target on the circle with minimum effort.
Key results
- Existence and uniqueness of a solution to the Schrödinger system on SO(2), proved by showing a fixed-point recursion is contractive in Hilbert’s projective metric.
- A geometric, coordinate-free controller that uses the intrinsic structure of SO(2) — never embedding it in the Euclidean plane.
- Numerical simulations confirm the theoretical construction of the bridge.
A Geometric Solution of the Schrödinger Bridge Problem on SO(2) via Stochastic Optimal Control — Hamza Mahmood, Adeel Akhtar.