Path Following for Quadrotors
Quasi-static transverse feedback linearization (QSTFL) that makes a quadrotor follow a geometric path with no extra controller states.
For a vehicle moving along a prescribed curve, a time-parameterized reference is the wrong tool: if the quadrotor slows down or stops, the reference keeps evolving and an artificial tracking error appears. Path following removes time from the reference and instead asks the vehicle to converge to, and stay on, a geometric path — regulating its speed along the curve independently.
We propose a quasi-static transverse feedback linearization (QSTFL) controller for a quadrotor. Unlike dynamic-feedback designs, it introduces no additional controller states: the thrust is computed algebraically from the current state, so there is no need to measure thrust derivatives or numerically integrate an extended system.
A quadrotor converging to a circular path and remaining on it — the path-following manifold is rendered invariant.
What the design guarantees
- The path-following manifold is made invariant: trajectories that start on the path stay on it for all future time.
- Local exponential stability of the manifold is proved via a diffeomorphic coordinate transformation, while tangential velocity and yaw are regulated simultaneously.
- Closed-form thrust and torque inputs; the decoupling matrix to invert is only 3×3 instead of 4×4, giving a simpler, cheaper control law than dynamic-feedback constructions.
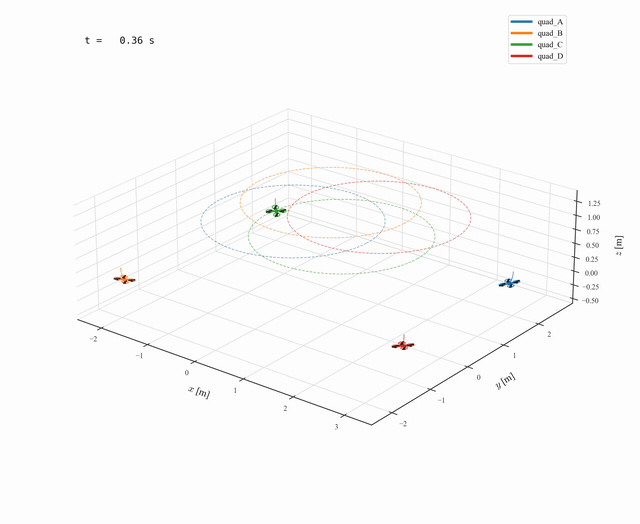
Multiple quadrotors following 3D circular paths under the QSTFL controller.
Path-following Control of a Quadrotor using Quasi-Static Transverse Feedback Linearization — Mohamed Al Lawati, Adeel Akhtar.